You would be hard-pressed to find an individual in IIT Madras who is unaware of the Avishkar Hyperloop team. Over the last year, Avishkar has gained a lot of attention in insti. After the multi-crore contract between them, L&T and Indian Railways was finalised, all eyes were on them to see whether they would be able to pull off what they had promised. In this agreement, Avishkar would design a 400 metre testing facility for Hyperloop Pods, which would then be manufactured by L&T using funding provided by Indian Railways. The recognition of the team on a national level left the student body amazed.
However, ranging from admiration and awe, to disillusionment and cynicism, the sentiment towards the team varies widely. While the headlines portray Avishkar as the most prominent success story of the institute, pioneering the next step in transportation technology, many people are not clear of where Avishkar stands today. What has been achieved over the past year? What is the next step? Where does Avishkar stand with regard to the international student community, with regard to Hyperloop Technology? Today, we are going to dive into all of these questions, and more.
What is Avishkar?
For those who don’t know, Avishkar Hyperloop is a student run competition team of the Centre for Innovation (CFI) in IIT Madras. It has the goal of achieving sustainable, and affordable, Hyperloop transportation. The team is currently in its 7th generation (Avishkar 7.0), and attends the annual European Hyperloop Week (EHW) conference for international student-run Hyperloop teams. The team consists of around 70 individuals, consisting of students from B.Tech, M.Tech, and Ph.D. degrees. The team is more research oriented compared to most other CFI Competition Teams, and regularly collaborates with industry, as well as research facilities on campus in order to test and validate ideas.

What has Avishkar achieved in the past year?
Avishkar has had a functional prototype for a few years now, and has consistently attended international Hyperloop related competitions in the same time frame. Over the past year, the team has progressed on multiple fronts, developing multiple ideas to further stages of implementation.

Every new idea in the team has three stages of development: Research, Test Setup, and On-Pod Implementation. These stages can potentially require multiple tenures to complete. As Pranav Singhal, one of the Team Heads, explained: “When you have something new, something that hasn’t been on the pod yet, you cannot put it on the pod in that tenure itself, because there are so many other subsystems that are dependent on any one particular new addition.” Due to this constraint, most ideas require multiple tenures before they can be implemented on-pod.

Keeping this in mind, Avishkar has made phenomenal progress over the past year. They have successfully completed the design of their 400 metre tube facility, which is now currently in the process of being manufactured by L&T at the Discovery Campus of IIT Madras. However, despite the envisioning of this project had occurred much earlier, almost all of the work for this project was achieved over the Avishkar 6.0 tenure last year. “For some context,” Pranav explained, “Indian Railways offered to help us with our project at the very end of the 5.0 tenure. Till then, not even the feasibility of this project had been validated.” Despite the circumstances, however, the team proceeded to rapidly complete the research for their design, conducted multiple Crumple Tests, and finalised a design for the manufacture of a tube with a thickness of just 6mm, within the last tenure. “We are researching the possibility of concrete tubes now, in order to further reduce costs,” said Prateek, the other Team Head.
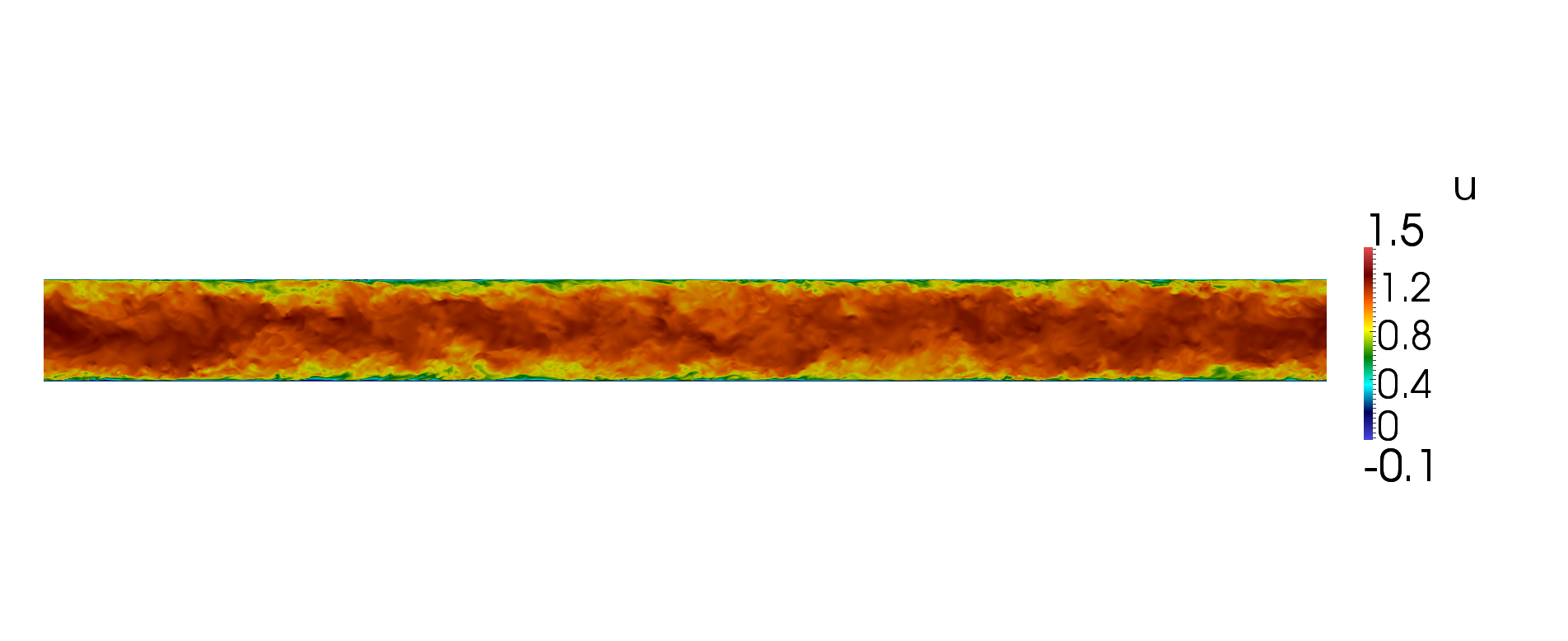
Avishkar 6.0 managed to create a functional Magnetic Levitation Test Setup, which they hope to integrate with the pod in the 7.0 tenure. However, the team is still not satisfied with its performance. The team is currently only using data of the position of the object to control the setup. “While a simple position feedback loop (a control system using positional data) was sufficient to levitate our test setup in a controlled manner, we were not able to integrate the system with the pod.” The team plans to overcome this hurdle by integrating the data of the current used by the system to their controller.
The team has also made significant progress on their Linear Induction Motor (LIM), which is used for the propulsion of their pod. “Most of the European teams which are ahead of us in terms of development have already switched to reluctance based propulsion systems,” said Pranav. “However, we wanted to be more systematic in our research, so we tried to fully flesh out and explore the capabilities of an Induction Motor before switching to other technologies.” Advait Iyer, a former member of the Traction Subsystem, elaborated further: “Till now, our pod has been using a DLIM (Double-Induction Motor), which utilises two sets of magnets along the side of the track in order to generate thrust.”
While this setup prevents an upward force component from being generated (which would affect the levitation system), it also makes it difficult to make the pod turn along with the track. To deal with this problem, the Avishkar 6.0 Traction team explored and developed a Test Setup for a SLIM (Single-sided Linear Induction Motor). Such a setup utilises only one set of magnets along the top of the track, which makes it more efficient, as well as making it easier to turn. However this came with its own set of challenges. For example, such a motor ends up delivering varying amounts of upward force while in operation, depending on the input voltage to the system. This then needs to be accounted for in the Levitation Control Systems. “In order to understand the effects of such a system, we developed our own parameterised simulation of the motor. We also succeeded in developing a v/f(voltage/frequency) controller for our motor, which enables us to control the thrust provided by the motor more accurately,” said Advait. The team’s simulated SLIM was then manufactured in collaboration with industry, in order to create a functional test setup.

What does Avishkar plan to achieve in this tenure?
When asked about its goals for next year, the team had no end of ideas to talk about. “The major focus, of course, will be on getting our Dynamic Levitation System to run within the 400m test facility. The next step is to make a new motor with the thermal aspect dealt with in the design stage itself. The hope is to take the new LIM with regenerative braking (recharging the batteries using energy harvested during braking) and better thermal management into the 400m tube.” said Pranav, excitedly.
Raghav Subramanian, the Electrical Subsystem Head, explained the unique challenge of thermal management on the pod. “We face a very unique set of circumstances, where we are unable to dissipate heat from the pod easily.” The lack of any physical contact between the pod and the tube prevents conduction from taking place, and the presence of a vacuum around the pod makes convection infeasible. “Spacecrafts have similar circumstances, but are able to dissipate heat through radiative methods, due to the large temperature difference between the spacecraft and the surroundings. However, in our tube, there will be no such temperature difference, eliminating the possibility of radiative dissipation,” said Pranav.
Given these circumstances, the team has had to look towards a completely new approach of thermal management. “We began exploring methods of storage of heat on the pod itself, using Phase Change Materials (PCMs),” said Raghav. Phase Change Materials are a relatively new technology being used in industry for the storage of heat. They utilise the property of materials to store heat at a constant temperature during a phase transition, such as from liquid to gas, or solid to liquid. The heat would be stored in such materials in a modular fashion, such that units could be replaced when the pod docks at a station. “We manufactured a primitive PCM during the last tenure. However, with better materials, a PCM with better thermal characteristics can be developed,” said Raghuram, a former member of the Thermal Subsystem. “However, I don’t think using it for thermal energy storage is feasible. It would just increase the weight of the whole pod.”
Achieving Dynamic Levitation in the pod will be one of the most challenging tasks of this year. “Since the system is highly non-linear, it has been very difficult to design a robust control system,” said Jay Gupta. Currently, the team is trying to linearize the system about certain stationary points, in order to simplify the control problem. “Another problem is that our current EMS (Electro-Magnetic Suspension) system requires too much power to levitate the pod. We are now exploring levitation using HEMS (Hybrid Electro-Magnetic Suspension).” While EMS only uses an electromagnet – which requires a constant power input – to levitate the pod, HEMS uses a permanent magnet to do most of the heavy lifting, with only control being achieved using electromagnets.

Another problem which will have to be solved by the Electrical Subsystem is Velocity Calculation. “Because it’s contactless, we can’t use the motion of wheels in order to estimate velocity. And because it’s in a vacuum tube, signals can’t go from the inside to the outside,” said Raghav. While velocity detection has been achieved in a test setup, it has yet to be implemented on the pod.
“We essentially utilised Linear Optical Encoders, with black and white strips being stuck along the track,” explained Aadarsh Kalyan, a former member of the Electrical Subsystem. Optical Encoders sense the difference in the amount of reflected light between black and white strips in order to identify motion. Since the width of each individual strip is known, the position of the pod can be calculated based on the number of strips that have been passed. On differentiating this positional data, we can get the velocity of the pod. “We are currently using IF (Infra-Red) sensors to detect the strips. We had the idea to use Image Sensor Modules in order to get accuracy on the scale of pixels, but due to time constraints before EHW, we were unable to implement this.” While IF sensors provide precision of around 10 mm, Image Sensor Modules could potentially provide precision in the range of microns. “Another method we implemented used IMUs (Inertial Measurement Units)” he explained. IMUs are sensors that can measure the acceleration of the vehicle. These readings can then be integrated to find the velocity of the pod. “We tried using Kalman Filters to integrate both readings into a single, more accurate measurement,” said Aadarsh. The team also explored ideas related to First-Packet Algorithms with EM Wave transmission, but as Aadarsh put it, “We didn’t have the time nor the knowledge to try to even implement this in a test setup.”
What’s next?
With such a dizzying assortment of goals, it’s clear that Avishkar will need help in achieving its ambitions. The team has clearly admitted that there are certain aspects that they are currently ill-equipped to solve on their own.
When told about the team’s goal of achieving regenerative braking in the 400m tube, a former team member laughed. “That’s… ambitious,” he said, finally. “Achieving regenerative braking will need a lot of industrial collaboration,” admitted Raghav. “The major problem is the control of the current that back-flows into your battery, right? The industry is already doing this very regularly and has done it to a good amount of perfection,” he said, explaining how industry collaboration could benefit the team in this area.
Regarding their thermal management goals, “We found that there are companies in Europe and America that have the sole function of developing thermal solutions for their clients,” said Pranav. However, these companies are generally reluctant to work with Indian organisations due to operational difficulties. “Maybe these companies are not organised in India. Or perhaps they are part of some conglomerate, making them less visible,” mused Pranav, when asked about the availability of such services in India. “These are just a couple of examples out of multiple places we would appreciate industry support,” he stressed.
Despite the development of multiple ideas, Avishkar 6.0 did not manage to implement most of them onto the pod. This led to a somewhat disappointing performance in EHW compared to previous tenures, with their most significant achievement being them placing third in the Business Category. In fairness, it seems that their most prominent achievement, the manufacturing of the 400 m testing facility, was not considered in the evaluation, but it is clear that Avishkar 7.0 will need to work harder to prove the results from the previous tenure on the pod.
While Avishkar Hyperloop has shown significant progress over the past year, it is evident that they have a long way to go. Their goals, while ambitious, cast doubt on the feasibility of their realisation within this tenure. However, the results from the previous tenure have set a firm stepping stone for the team’s future success. Here’s to hoping they utilise this chance wisely!
Edited by Ankita Murthy.

Nachiketh Grandhi
A student of Engineering Design in IIT Madras. Interested in education, sustainable technologies, and agriculture.